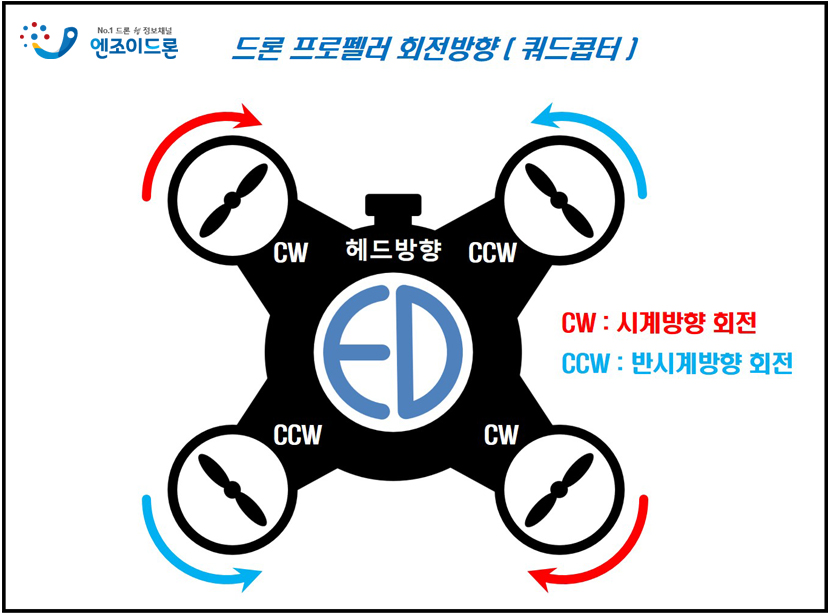
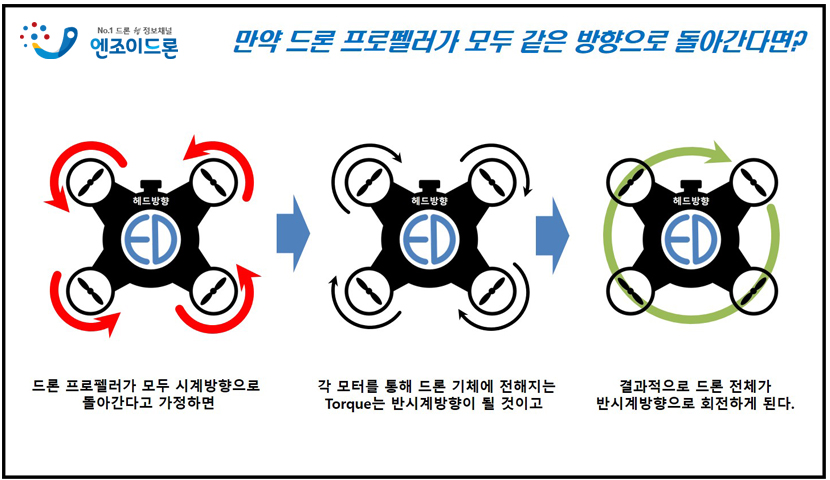
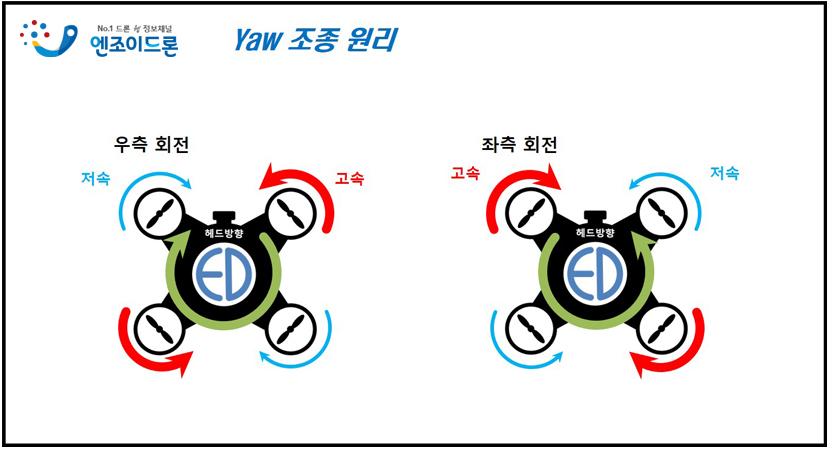
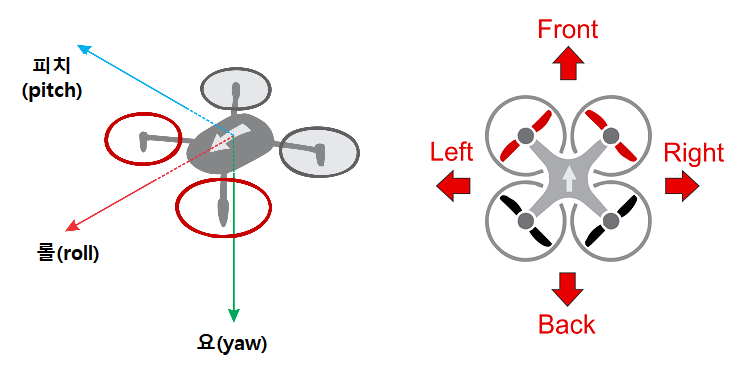
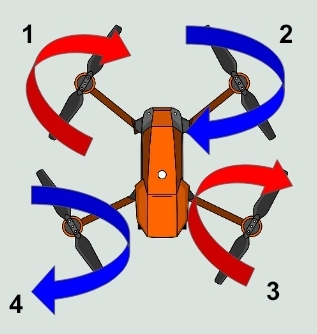
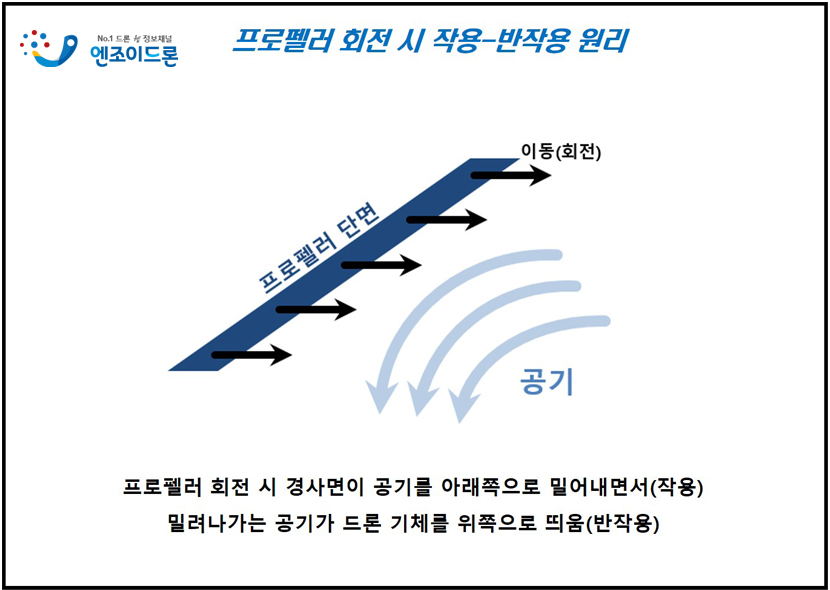
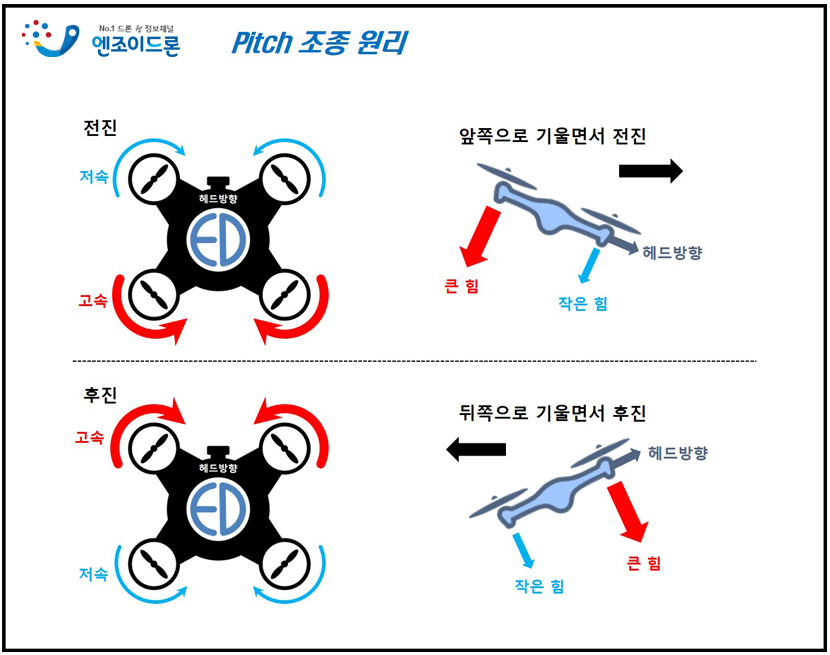
프로펠러를 제어할 수 있는 컴퓨터 회로와 4방향 프로펠러로 구성되어 있다. 컴퓨터에는 드론의 기울기와 회전 정도, 높이(기압으로 측정)를 측정할 수 있는 센서가 있다. 모터가 돌아가면 프로펠러가 돌아가게 되는데 이에 대한 반작용으로 본체가 회전하게 된다. 따라서 반대로 돌아가는 것을 방지하기 위해 프로펠러는 4개가 달려 있다. 2개가 정방향으로 도는 경우 2개는 반대방향으로 도는 방식으로 구성된다. 방향을 조절하려면 각 방향 중 프로펠러 2개를 지워야 한다. 예를 들어 왼쪽으로 가려면 오른쪽으로 도는 프로펠러를 달고 왼쪽으로 도는 프로펠러 2개를 자르면 왼쪽으로 움직인다. 헬리콥터가 날아오를 때 아래 공기를 밀어내는 추력을 이용하듯 반대 방향으로 도는 프로펠러를 돌려 원하는 방향으로 향하게 하는 것이다. 방향 조절의 핵심은 반대 방향으로 돌아가게 한다는 것이다.반면 전진이나 후진 속도에 영향을 주는 것은 모터 회전수다. 회전수가 커지면 반대 방향으로 밀어내는 공기의 힘이 커지기 때문에 속도가 빨라진다. 4방향 모든 모터의 출력을 동일하게 높이면, 즉 같은 회전수로 돌리게 되면 4개의 모터가 균형을 잡고 방향을 바꾸지 않은 채 수직 상승한다.
전체적으로 드론을 구동하는 원리만 써봤다. 드론은 주로 짝수 프로펠러를 사용한다. 그래야 방향 조절이 쉬워지기 때문이다. 가장 많이 사용되는 프로펠러의 수는 정사각형의 각 모서리마다 하나씩 프로펠러를 위치시키는 4개의 것이다. 2개는 끄고 2개는 켜도록 작동시킨다. 위 사진처럼 프로펠러 3개 드론은 회전수 조절이 더 정교해야 한다.

첫 등장은 역시 군사적 목적이었다고 한다. 위는 미 공군이 보유한 무인정찰기인 것으로 알려졌다. 요즘은 드론 하면 군사용 무인항공기보다는 항공샷을 찍는 장비를 떠올리는 것 같다.
인기글